Laser Cut Box Project
Date: 8-28-2025
Description: I laser cut and assembled a personal box designed to hold all of my engineering materials. This box was my first experience with the laser cutter since freshman year, and it helped me understand how to prepare a vector file and adjust settings on the laser cutter.
Pen Turning Project
Dates: 9-1-2025 to 9-12-2025
Process Summary:
9-1-2025: Selected the wood type for my pen and cut it to size.
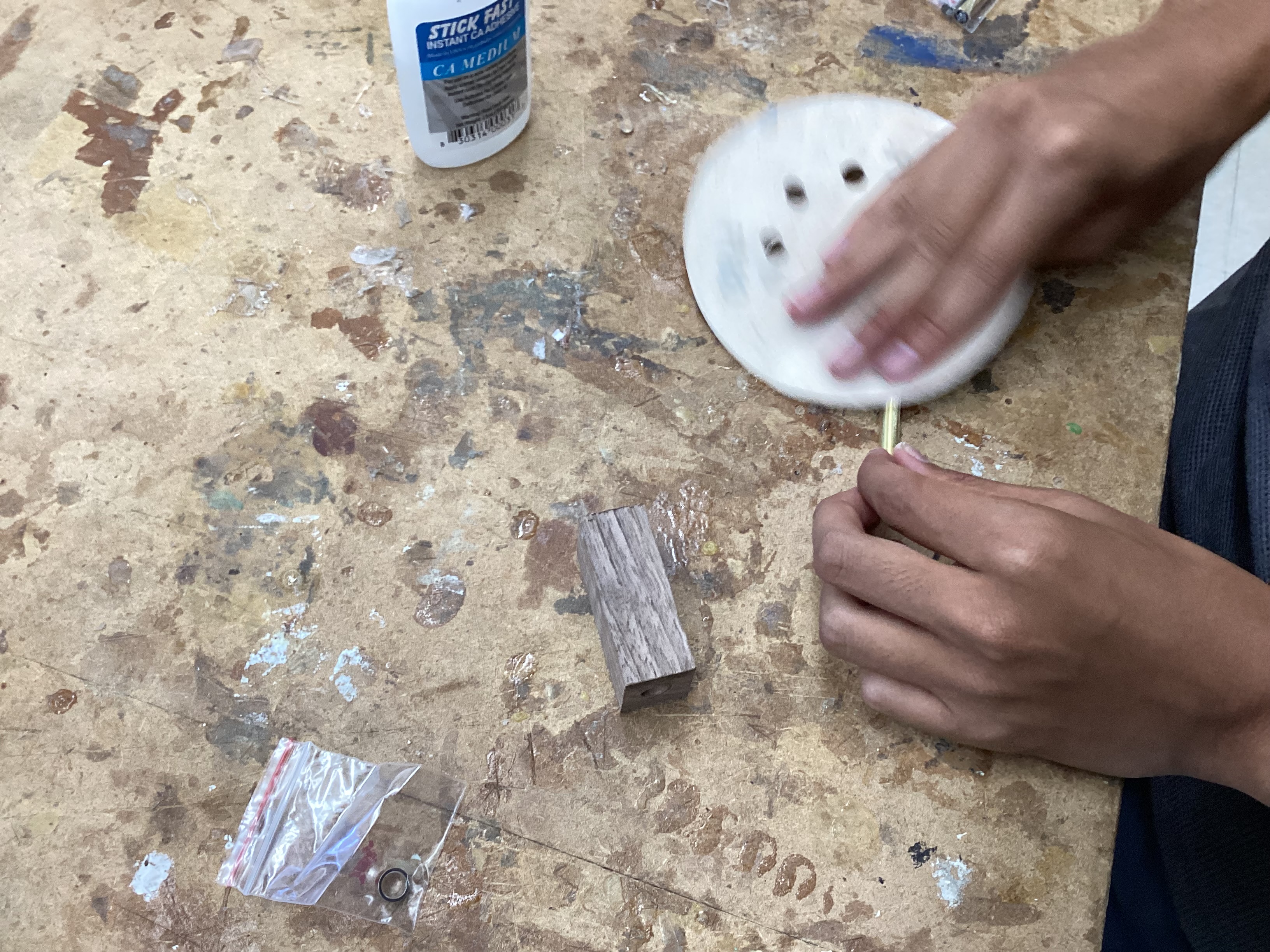
9-3-2025: Finished cutting all wooden blanks and glued the pieces together using wood glue.
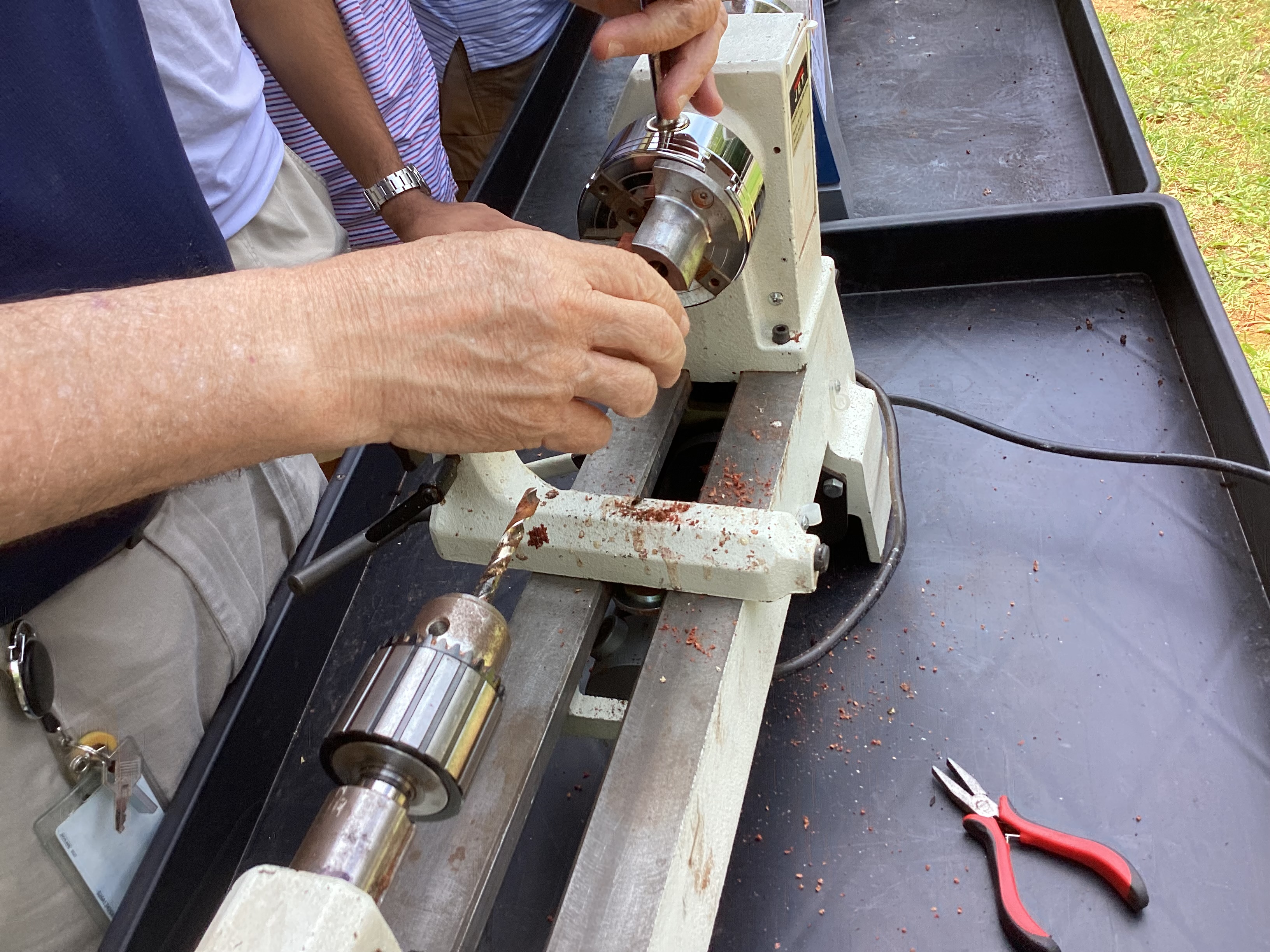
9-4-2025: Drilled a hole through the glued wood blanks and inserted the metal shaft (pen insert).
9-5-2025: Started turning the pen on the lathe and shaping it. Unfortunately, the wood cracked during turning, which meant I had to start over with a new blank.

9-8-2025: Prepared and glued the new wood blank, then re-drilled the hole.
9-9-2025: Inserted the new metal shaft and began setting up a GitHub page to track my engineering work.
9-10-2025: Successfully turned the pen to the desired shape and sanded it down to a smooth finish.

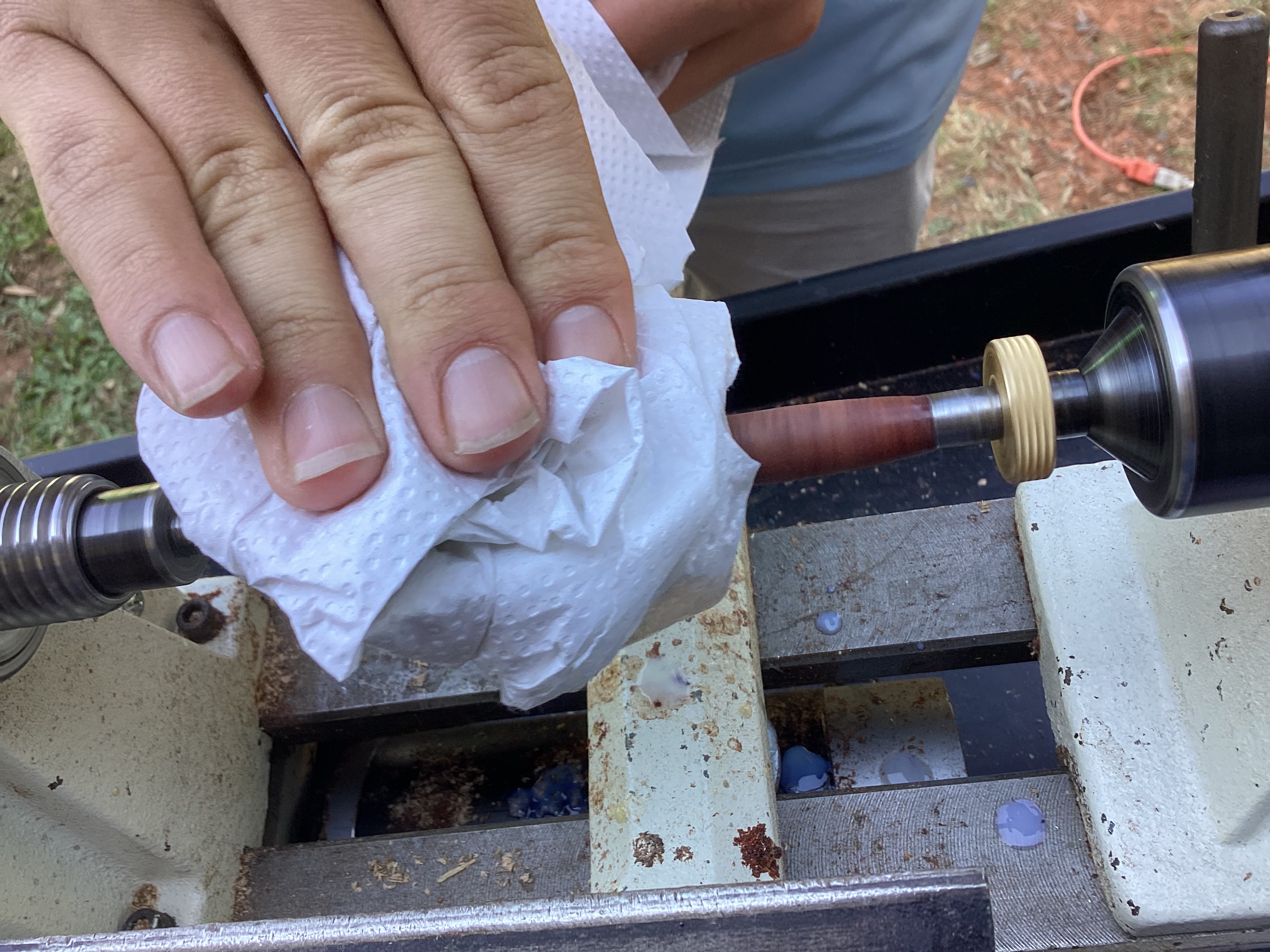
9-12-2025: Assembled the final pen with all components and tested its functionality.

Reflection:
This project taught me how to use the lathe safely and effectively. I learned the importance of patienc when the first piece cracked. Restarting allowed me to practice better pressure control during turning. I also gained experience in drilling, gluing, and assembling components.
Soldering: The Owl Project
Dates: 9-28-2025 to 9-30-2025
Process Summary:
9-28-2025: Practiced soldering on a test board with 3 resistors. Then began soldering the Owl Project PCB, starting with resistors, capacitors, and transistors.

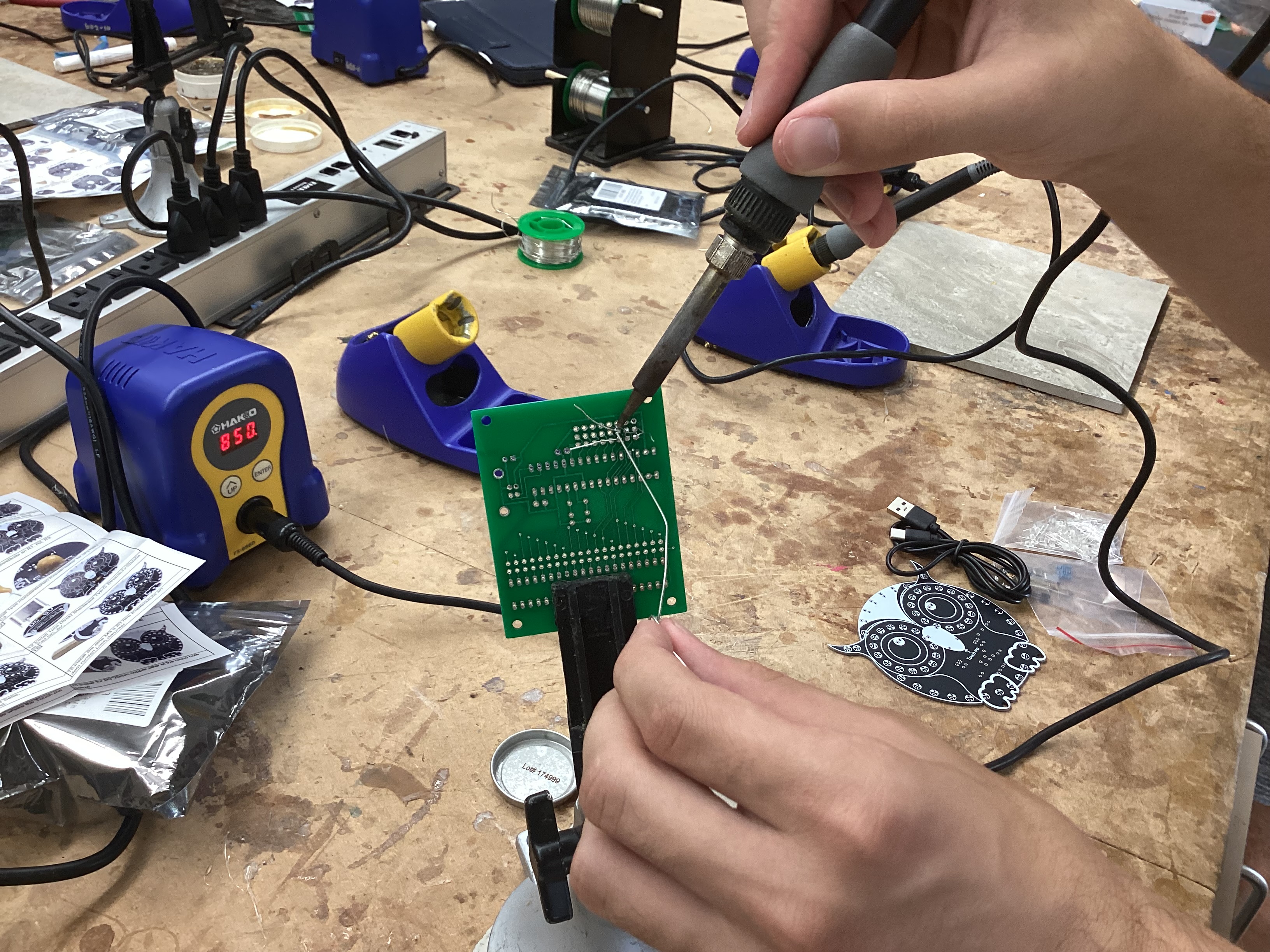
9-29-2025: Continued soldering LEDs onto the board.

9-30-2025: Finished soldering all LEDs, the USB port, and ICs (integrated circuits). Final testing confirmed the board was functional.

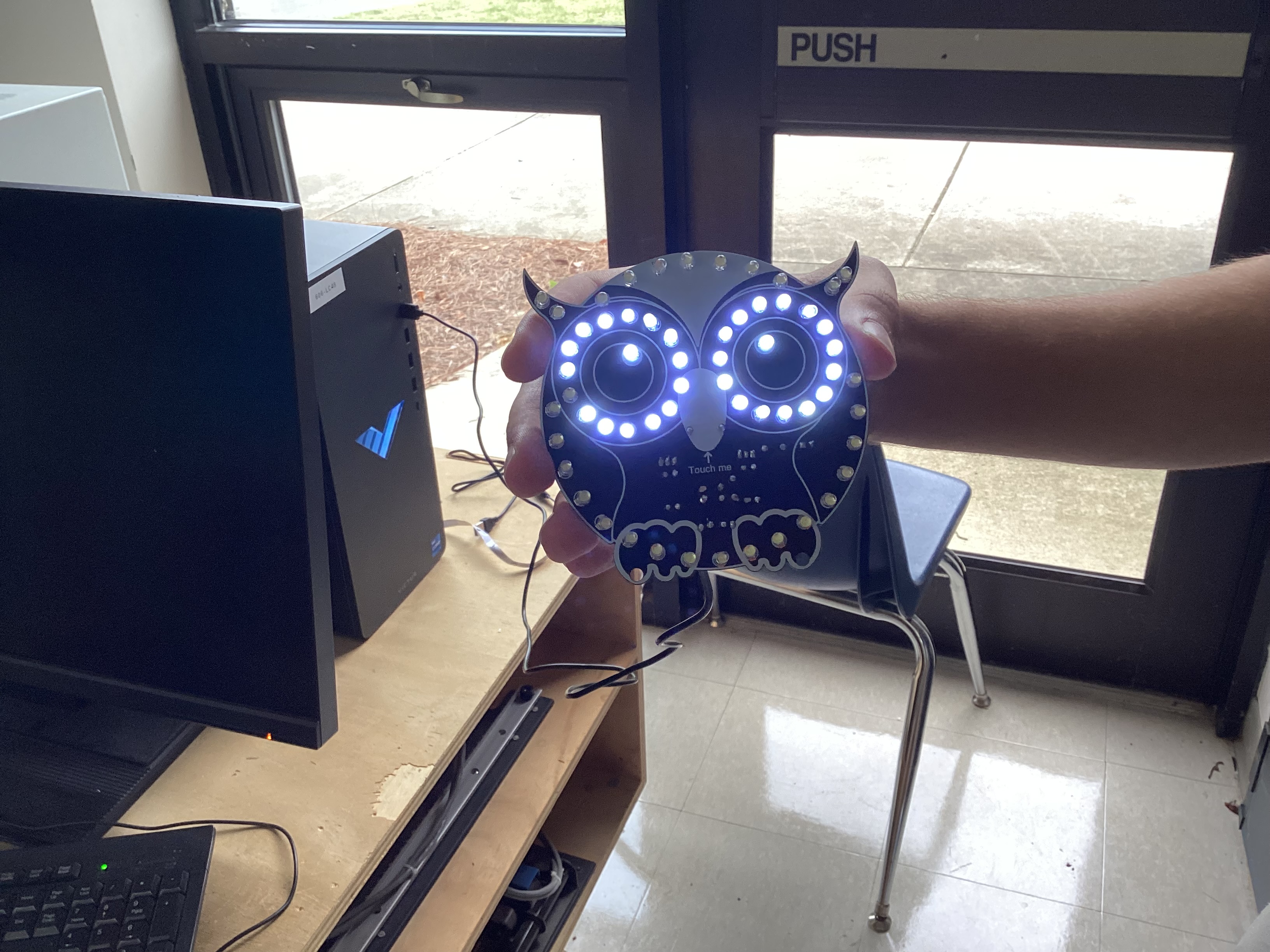
Successes:
Successfully soldered all components with clean joints.
The Owl Project functioned correctly after first testing.
Setbacks & Solutions:
Some solder joints were initially cold or uneven. I identified and reworked these using flux and re-heating.
One LED was initially installed backward, so I desoldered and reoriented it properly.
What I Learned:
I improved my soldering precision and learned how to identify component orientation. This experience also taught me how to troubleshoot circuit boards and understand basic electronic components and their roles.
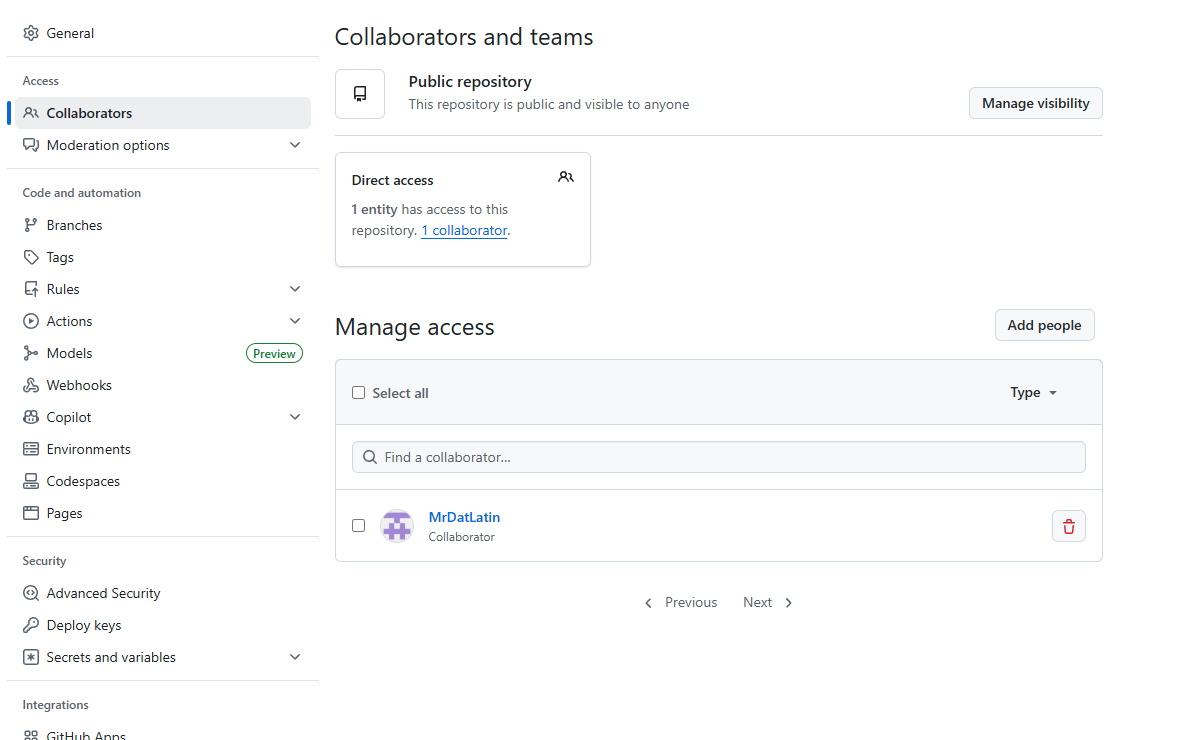
GitHub Repository
Date Started: 9-15-2025 Description: I created a GitHub repository to document all of my engineering projects. It includes logs, pictures, and reflections.
Date Started: 10-17-2025 Description: Mr. Dubick showed us how to setup our Jekyll pages.
Screenshot of Shared Repository
CNC Topography Project — Journal Entries
-
11-20-2025
Finalized Aspire toolpaths for the CNC topography project.
Updated documentation to better explain the CNC milling workflow and corrected gaps in earlier entries. -
12-11-2025
Ran the CNC job to machine the topography file.
Identified potential issues with cutting depth and vacuum shoe clearance, and adjusted the vacuum shoe height with assistance from Dr. Taylor, allowing the cut to proceed without interference.
Capstone Project: Robotic Arm Cup Holder for Pearl Rehab Center
Project Name: “Adaptive Arm-Based Beverage Delivery System”
Description:
In collaboration with Pearl Rehab Center, I began designing an assistive device to help users with limited mobility access drinks more easily. This robotic arm is meant to hold and move a cup to the user.
Bill of Materials

Daily Journal:
-
9-18-2025
Committed to working with Pearl Rehab Center and began research into existing assistive technologies. -
10-1-2025
Researched cup holder mechanisms and mounting systems.
Evaluated servo motor options for the robotic arm.
Collaborated with Aaron to define design requirements and produced an initial system sketch. -
10-8-2025
Refined overall project concept and clarified system goals.
Began planning the mechanical arm structure and self-balancing cup holder approach. -
10-15-2025
Began preliminary CAD planning for robotic arm components.
Considered joint layout, range of motion, and modular design for 3D printing. -
10-22-2025
Planned Arduino control approach and basic servo wiring layout.
Researched motion control strategies and safety considerations. -
10-29-2025
Prepared for initial prototyping and identified required materials and print settings.
Reviewed design assumptions and noted areas for iteration. -
11-6-2025
Reviewed project requirements and accessibility goals for users with limited mobility.
Refined ideas for how the robotic arm would approach and deliver a cup safely. -
11-7-2025
Continued research on self-balancing cup holder mechanisms.
Looked into passive vs. active stabilization approaches. -
11-8-2025
Sketched alternative cup holder and arm joint concepts.
Considered how center of gravity affects spill prevention. -
11-13-2025
Began outlining the mechanical structure of the robotic arm.
Considered joint count, arm reach, and mounting options. -
11-14-2025
Researched Arduino-compatible servo control methods.
Reviewed example Arduino servo projects for reference. -
11-18-2025
Compared different servo motor torque ratings and sizes.
Evaluated tradeoffs between strength, precision, and cost. -
12-8-2025
Reviewed overall system design and identified components needing further refinement.
Updated project documentation to reflect current progress. -
12-10-2025
Planned next steps for CAD modeling and prototyping.
Organized research notes and reference materials. -
12-11-2025
Continued refining design ideas for the self-balancing cup holder.
Considered how the cup holder will interface with the arm. -
12-14-2025
Reviewed safety considerations related to user interaction and motion limits.
Noted potential improvements to reduce spill risk. -
12-16-2025
Prepared for upcoming fabrication and electronics work.
Finalized short-term goals for continuing development of the project. -
1-6-2026
Worked on task analysis for the project to better understand the steps required to complete the robotic arm system.
Identified major tasks including mechanical design, electronics setup, programming, and testing. -
1-7-2026
Continued refining the project timeline and identifying which components needed to be completed first.
Discussed with Aaron how the mechanical arm components and electronics would integrate once prototypes are completed. -
1-9-2026
Researched Arduino servo control and reviewed example code for controlling servo motors.
Focused on understanding how servo angles and movement timing are controlled through programming. -
1-13-2026
Studied wiring diagrams for Arduino and servo motors to better understand how the electronics should be connected.
Reviewed power requirements to ensure the system can operate safely. -
1-15-2026
Began drafting basic Arduino code to test servo movement.
Focused on confirming that the servo responds correctly to angle commands. -
1-21-2026
Continued testing Arduino servo control and experimenting with delay timing to improve smoothness of movement.
Evaluated how speed adjustments affect motion safety. -
1-23-2026
Reviewed the mechanical arm designs Aaron created and discussed how the electronics would be mounted on the system.
Considered how wiring will be routed to avoid interfering with arm movement. -
1-27-2026
Researched common servo issues such as jitter and power limitations.
Looked into ways to improve stability and reliability when controlling multiple servos. -
1-29-2026
Continued improving the structure of the Arduino code so that motion commands are easier to adjust during testing.
Reviewed how different servo angles will affect the reach of the arm. -
2-3-2026
Reviewed design updates for the cup holder and mounting system.
Discussed how the electronics and PCB board will connect to the robotic arm assembly. -
2-5-2026
Continued refining Arduino code and testing servo movement logic.
Focused on programming slower and smoother motion to improve safety. -
2-7-2026
Researched other robotic arm projects to understand how motion sequences and safety limits are implemented.
Used these examples to improve ideas for the control system. -
2-10-2026
Continued planning the electronics layout and how the control board will be mounted to the system.
Considered how wiring will connect from the control board to the servos. -
2-12-2026
Reviewed system integration plans with Aaron to make sure the mechanical design and electronics layout work together properly.
Discussed adjustments needed to support both structure and wiring. -
2-18-2026
Continued working with Arduino code for servo control.
Tested different motion sequences that could be used to move the cup toward the user. -
2-20-2026
Reviewed project documentation and updated notes on servo choices, electronics layout, and system design.
Reflected on progress and identified areas that still require testing. -
2-24-2026
Continued researching improvements to servo motion control.
Looked for ways to reduce sudden movements and improve smoothness of the robotic arm. -
2-26-2026
Reviewed project progress with Aaron and discussed remaining tasks for completing the prototype.
Identified areas where further testing and refinement will be needed. -
3-3-2026
Updated project portfolio and documentation to reflect the most recent design decisions and development work.
Reviewed next steps for completing the prototype and preparing for the final presentation.
What I’ve Been Working On
Aside from the listed projects i’ve spent time learning Fusion 360 and Tinkercad to create models that can be 3D printed. I’m also becoming more familiar with Arduino so that I can eventually control the robotic arm electronically. Our next steps will involve writing simple control code for motor movement and testing the assembly of the cup holder.